Higher-order approximations
for space-fractional diffusion equation
Abstract.
Second-order and third-order finite difference approximations for fractional derivatives are derived from a recently proposed unified explicit form. The Crank-Nicholson schemes based on these approximations are applied to discretize the space-fractional diffusion equation. We theoretically analyze the convergence and stability of the Crank-Nicholson schemes, proving that they are unconditionally stable. These schemes exhibit unconditional stability and convergence for fractional derivatives of order in the range . Numerical examples further confirm the convergence orders and unconditional stability of the approximations, demonstrating their effectiveness in practice.
Key words and phrases:
Fractional derivatives, Grünwald approximation, unified explicit form, space fractional diffusion equation.2005 Mathematics Subject Classification:
26A33, 34B05, 34D20, 65L03, 65L20, 65L11.1. Introduction
Fractional derivatives, for example, the Riemann-Liouville, Caputo, and Grünwald-Letnikov derivatives, have found numerous applications across various applied fields, including physics [10, 13, 27, 28], biology[7, 29, 30], finance[25, 26], and engineering [11, 12, 15, 16, 17, 18]. Their unique characteristics such as non-locality give more suitable descriptions for various phenomena, including anomalous diffusion, population dynamics, fractional Brownian motion, etc. compared to traditional derivatives. However, the non-local nature of fractional derivatives often leads to complex formulas, making it difficult to solve fractional-order differential equations, such as fractional-order diffusion equations, using both analytical and approximate methods [6, 8, 24].
The Grünwald difference (GD) approximation presents a finite difference technique for approximating fractional derivatives. It utilizes an infinite sum of terms derived from the power series expansion of the generator about zero [6]. Despite its first-order accuracy, the GD approximation yields unstable results, even with stable methods like Euler and Crank-Nicholson, which are typically reliable for integer-order diffusion equations. To address this, a shifted version with shift was introduced [8], aiming to restore unconditional stability while preserving first-order accuracy for fractional derivatives.
The shifted Grünwald approximation has served as a cornerstone for constructing higher-order finite difference approximations for fractional order differential equations. Meerchaert et al. [20] employed extrapolation technique on the Crank-Nicholson scheme of the Shifted Grünwald approximation for the fractional diffusion equation to obtain the second-order accuracy for the space discretization. Nasir et al. [19], from the shifted Grünwal approximations with a non-integer shift , obtained a second-order accuracy which displays super convergence. Convex combinations of the shifted form of the Grünwal approximation with various shifts were used to obtain some second-order approximations [21]. This technique is referred in the literature as the weighted and shifted Grünwald difference(WSGD) approximations. A third-order approximation through WSGD was not successful as it fails to give the desired stability for a fractional derivative order in the range . However, achieving stability for the third-order approximation is possible within a restricted range of the fractional order as shown in [23]. Hao [22] derived a fourth-order approximation using a quasi compact difference approximation technique on a WSGD approximation. Additionally, by utilizing super-convergent approximations for fractional derivatives, Zhao and Deng [34] proposed a series of higher-order difference schemes for the space fractional diffusion equation.
Moreover, Lubich [5] proposed generators in the form of power or rational polynomials to construct higher-order approximations for fractional derivatives. While these generators provide coefficients for higher-order accuracy without shifts, their shifted forms only yield first-order approximations regardless of the original accuracy orders.
Nasir and Nafa [4] introduced polynomial-type generators for higher-order approximations with shifts and derived a second-order finite-difference scheme for the one-dimensional fractional diffusion equation. In construction of this work, Nasir and Nafa [3] and Gunarathna et al. [14] developed quasi-compact schemes with third-and fourth-order accuracy, respectively, both derived from the second-order approximation and applied them to the one-dimensional fractional diffusion equation.
The generators for the Nasir and Nafa [4] approximations are usually obtained manually by hand calculations, solving a resulting system of linear equations or by symbolic computations and these processes are specific to the problem at hand. To alleviate those difficulties, Gunarathna et al. [9] have obtained an explicit form for generators that gives approximations for fractional derivatives with shifts retaining their higher orders. This form generalizes the Lubich form with shift and hence the Lubich form becomes a special case with no shift. Gunarathna et al. [31] then extended the explicit form developed in [9] to a more general unified explicit form that gives more new approximations for fractional derivatives and various finite difference formulas for any classical derivative.
In this paper, we apply the unified explicit form in [9] to the space fractional diffusion equation given by (1). We consider a second-order approximation derived from this unified form. Subsequently, a new quasi-compact third-order approximation is derived from this second-order approximation. Using these approximations, second-and third -order Crank-Nicholson (C-N) schemes are constructed for the space fractional diffusion equation. Theoretical analyses of stability and convergence are established for both the C-N schemes.
| (1) |
with the initial and boundary conditions:
| (2) |
where is the unknown function to be determined; are non-negative constant diffusion coefficient with , i.e., not both are simultaneously zero; is a known source term. The fractional derivatives and , in Riemann-Liouville sense, are given in Definition 1.
The remaining sections of this paper are structured as follows: Section 2 presents essential preliminaries and terminologies. Section 3 applies the unified form to obtain new second-and third-order approximations for fractional derivatives and obtain their Crank-Nicholson (C-N) schemes with order and order to solve the space fractional diffusion equation. Section 4 analyses the C-N schemes derived in Section 3. Section 5 presents numerical examples. Section 6 concludes the paper.
2. Preliminaries and Terminologies
This section presents the requisite materials and definitions relevant to the subject of the paper. Let be a sufficiently smooth function defined on a real domain .
Definition 1 ([6]).
The left(-) and right(+) Riemann-Liouville (R-L) fractional derivatives of a real order are defined as
| (3) |
and
| (4) |
respectively, where , an integer with and denotes the gamma function.
Definition 2 ([4]).
Let be a sequence of real numbers with generating function
Define a shifted difference formula with shift as
| (5) |
-
1)
is said to approximate the fractional derivatives if
(6) -
2)
is said to approximate the fractional derivatives with order if
(7)
Proposition 3 (Theorem 1 [4, 3]).
Let and a non-negative integer be given. Let a function and for . Then, a generator approximates the fractional derivatives with order and shift , , if and only if
| (8) |
Moreover, if , where , then we have
| (9) |
2.1. The unified explicit form
In this section, the unified form appearing in [31] is presented. This unified form extends the explicit form in [9] to a more general form that covers compact finite difference formulas for higher order classical derivatives as well as some new Lubich type generators for fractional derivatives. For this, we introduce a base differential order , a positive integer, to express the fractional differential operator as
and consider approximating the fractional derivative by a Lubich type generator of the form
| (10) |
where corresponds to the classical derivative operator . The coefficients in (10) are to be determined based on the fractional order , the required approximation order , and shift . The degree of is similarly determined based on and . This setup leads to the following theorem.
Theorem 4.
With assumptions of Proposition 3, the generator of the form , where is a positive integer, approximates the fractional derivatives at with order and shift if and only if the coefficients satisfy the linear system
| (11) |
where and is the Kronecker delta having value of one for and zero otherwise.
Proof.
In view of Proposition 3, we have . This gives
where and
| (12) |
Since does not have any pole singularities by virtue of (8), we have for . Moreover, since , we have . These are the consistency condition for the GTA with generator . Now, for order , these conditions give the system (11) with and the proof ends. For , reduces to
where and
| (13) |
Expansion of gives
| (14) |
Theorem 5.
3. Applications of the unified explicit form
This section applies the unified explicit form to derive a second and third order approximations.
3.1. Second-order approximation
To derive the second order approximation, the following generating function form:
| (17) |
is considered. The coefficients , and are computed using the unified form equation (15). The computed coefficients are: and , where .
3.2. Third-order approximation: Quasi-compact form
Now, we derive a new quasi-compact third-order approximation from the second-order approximation described in the Section 3.1. In view of Proposition 3, we have
where and
3.3. Discretization of the space fractional diffusion equation
The discretization of the space fractional diffusion equation (1) in the domain is considered. The function is zero-extended outside the space domain interval so that the left and right fractional derivatives are applicable. For a numerical scheme, the space domain is partitioned into a uniform mesh of size with sub-interval length , and the time domain into a uniform partition of size with sub-interval length . These form a uniform partition on the 2-D domain with grid points , where and . The following notations are also introduced for conciseness:
Furthermore, prior to the construction of the C-N schemes, it should be noted that the time derivative at may be approximated with order accuracy as follows:
| (22) | ||||
| and | ||||
| (23) | ||||
3.4. Second-order Crank-Nicholson scheme
Using Equations (22) and (23) the FDE at gives the C-N scheme:
| (24) |
where . Rearranging (24) gives
| (25) |
for all and . The corresponding matrix form of (25) is given by
| (26) |
for all , where ,
where are the power series coefficients of the generating function as seen in (17). They can be computed using the J. C. P. Miller recurrence.
Now, let be the solution of (26) after neglecting the terms with , where its entries become the approximate values of the exact values . Also, let and be the reduced matrix from and , respectively by deleting the first and last rows and columns, and be the reduced vector obtained from by removing its first and last entries. After imposing the boundary conditions (2), Equation (26) becomes to be on the ready-to-solve form:
| (27) |
where and and are the first() and last() column vectors of the matrix reduced again as before.
3.5. Third-order quasi-compact Crank-Nicholson scheme
The new order quasi compact approximation is applied to numerically solve the space fractional diffusion equation with third-order accuracy. Pre-operating (1) by which is given by (20) gives
| (28) |
With the aid of the second-order approximations given by Equations (22) and (23), the FDE at gives the C-N scheme
| (29) |
where Rearranging (29) yields
| (30) |
Consequently, in matrix language, the C-N scheme (30) can be read as
| (31) |
for , where is a tri-diagonal matrix with size and . After imposing the boundary conditions (2), Equation (31) reduces to the following form:
| (32) |
where and and are the first() and last() column vectors of the matrix reduced again as before.
4. Stability and convergence analysis
This section analyzes the stability and convergence of the C-N schemes presented in Section 3.4 and Section 3.5 for the fractional diffusion equation. The analysis also requires certain properties of definite matrices and equivalent norms, to which the reader is referred in the references [33, 34], in addition to the following useful results.
Lemma 6 ([33]).
Let be the Hermiatian part of a complex matrix . For any eigenvalue of with its real part , we have
where and are the minimum and maximum eigenvalues of , respectively.
Definition 7 ([34]).
A function is called the generator of a Toeplitz matrix if
Lemma 8 (Grenander-Szego theorem, [32]).
Let the generator of a Toeplitz matrix be a -periodic continuous real-valued function. Then
where denote the minimum and maximum values of respectively in . Moreover, if , then all eigenvalues of satisfy and furthermore, if , then is positive definite.
Lemma 9.
If is the generating function for a Toeplitz matrix , then is the generating function of the shifted Toeplitz matrix .
Proof.
Let be the Toeplitz matrix for the generating function . Then
The result follows with . ∎
Lemma 10.
The generating functions of the matrices and corresponding to the approximation operators and of the second-order approximation with shift are given by and its conjugate , respectively.
Proof.
The matrix is Toeplitz given by . Now,
The result follows with A similar argument follows for the as well. ∎
Note that the two generating functions are mutually conjugate. Furthermore, the following results are also required.
Let be the space of grid functions in the interval computational domain with uniform subintervals of length . Associated with the analysis carried out in [22], for , the following discrete inner products and the corresponding norms are defined below:
Define difference operators on the component of as
Theorem 11.
Let be a self adjoint operator defined on such that and be a negative definite operator. Suppose that there exists a vector such that
| (33) |
provided
| (34) |
Then,
where with and for all .
Proof.
The negative definiteness of the operator implies that
.
. Summing this for the first inequalities results:
Equivalence of the two norms concludes the proof. ∎
Lemma 12.
Leading to the above inner products and norms, the following results :
-
(a)
The operator is self adjoint on .
-
(b)
for any .
-
(c)
The operator is selft–adjoint on , where is a given constant.
Proof.
-
(a)
Take any . Then, we must show that We first note that and , since the vectors and have zero boundary values; thereby, we have:
for all . That is, is self adjoint on .
-
(b)
From Part (a), we have:
-
(c)
Letting and using Part (a), we get:
for all . Therefore, is a self–adjoint operator.
∎
4.1. Analysis of the second-order C–N scheme
This section gives the stability and convergence analysis of the C–N scheme presented in Section 3.4. First, Lemma 13 is presented along with its proof:
Lemma 13.
The matrices and are negative definite for . Therefore, the corresponding operators and are also negative definite.
Proof.
The generating function of matrix is given by .
where , ,
and .
The real part of is given below:
for
, where
.
It must be shown that .
Now, if and only of , since .
Therefore, it will be proved that over the domain .
Let .
For a fixed , differentiating with respect to gives
The foregoing derivative assumes positive values over the interval for an and thus, the function is monotonically non-decreasing function over the interval . Therefore, the maximum and minimum values of are and , respectively. Therefore, is a non increasing function and thereby its maximum for . Now, by Lemma 8, we have .
Now, for any non–zero vector , consider . Thus, the matrix is negative definite. Consequently, , , and are negative definite. This completes the proof. ∎
Remark 14.
Since the matrices and are negative definite, the matrix is also negative definite for any positive constants and . Therefore, the operator is negative definite. Or, we may prove this using the linearity property of inner product: Let any . Then, we have
Theorem 15.
Proof.
We have from Equation (27) that the iteration matrix of the C–N scheme, . To establish a stability criterion, we must have the spectral radius of , . Now, for any , we have . Then, if and only if if and only if . Also, we have . Now, . Therefore, since , and are positive, if and only if . Now, from Lemma 13, we have . This completes the proof. ∎
Theorem 16.
The Crank-Nicholson finite difference scheme (24) with given initial and boundary conditions converges with order for .
Proof.
Let be error at grid point , where and denote the exact solution of the diffusion equation (1) and the corresponding approximate solution given by (24). Then, and .
Also, let and , where denotes the remainder term of (24) at , , , and .
Now,
, where is a positive constant. Therefore, .
Also, it is easy to see that, the error vector governs the difference system:
| (38) |
In comparison with Equation (33), in Equation (38), is the identity operator and hence it is self–adjoint and its norm is equivalent to that of . So, . Also, from Remark 14, for , the operator is negative definite. Then, Theorem 11 views
where .
So, we complete the proof. ∎
4.2. Analysis of the third–order C–N quasi-compact scheme
In this section, the analysis of the proposed third order quasi–compact approximation is presented.
Lemma 17.
The QCD operator of order in (3.2) leads to the following for :
-
(a)
for .
-
(b)
The operator is self–adoint and for , where .
Proof.
(a) It is not hard to see that, the maximum of over the domain is , occurring at and the minimum of over is , occurring at . Therefore, for
(b) Take any . Applying Part (c) of Lemma 12 with gives that the operator is self–adjoint.
Now, using Part (b) of Lemma 12, we have: . Hence, we complete the proof. ∎
Theorem 18.
The quasi compact Crank–Nicholson scheme (32) with the approximation from the generating function is unconditionally stable for .
Proof.
Consider the iteration matrix, , of the C–N scheme set off in Equation (32) given by , where . Now, arguing analogously to Section 4.1, the spectral radius of matrix , if and only if . The eigen-values of are given by
since when , for Thus, ; thereby we have if and only if .
Now, , since owing to Lemma 13. This results in giving . Therefore, the order Crank–Nicholson scheme is unconditionally stable for . ∎
Theorem 19.
5. Numerical results
In this section, numerical examples are given to demonstrate the unconditional stability, convergence order, and accuracy of each scheme derived in Section 3. The following test example is considered:
Example 20.
Let and . The following example uses constant diffusion coefficients.
Let, at a time final time , the exact solution vector be defined by and a corresponding approximate solution vector be denoted by . Then the maximum norm of error vector at grid size is given by . The numerical convergence order is calculated by
.
First, the second-order Crank-Nichoslon scheme is applied to Example 20 to calculate the errors and convergence orders for , and . We choose
with uniform sub-interval sizes and . We then apply the new order quasi compact C-N-scheme presented in Section 3.5 to Example 20. The space domain is handled with sub-partitions and time domain is handled with sub-partitions.
Table 1 and Table 2 demonstrate maximum absolute errors and convergence orders of these schemes.
| 8 | 3.6245e-05 | – | 3.4278e-05 | – | 1.3912e-05 | – | |
|---|---|---|---|---|---|---|---|
| 16 | 8.5169e-06 | 2.08 | 8.3193e-06 | 2.04 | 5.6605e-06 | 1.29 | |
| 32 | 2.0773e-06 | 2.03 | 2.0709e-06 | 2.00 | 1.4222e-06 | 1.99 | |
| 64 | 5.1597e-07 | 2.00 | 5.1907e-07 | 1.99 | 3.5503e-07 | 2.00 | |
| 128 | 1.2880e-07 | 2.00 | 1.3012e-07 | 1.99 | 8.8753e-08 | 2.00 | |
| 256 | 3.2192e-08 | 2.00 | 3.2587e-08 | 1.99 | 2.2192e-08 | 1.99 | |
| 512 | 8.0477e-09 | 2.00 | 8.1546e-09 | 1.99 | 5.5488e-09 | 1.99 | |
| 1024 | 2.0120e-09 | 1.99 | 2.0397e-09 | 1.99 | 1.3877e-09 | 1.99 | |
| 2048 | 5.0323e-10 | 1.99 | 5.1009e-10 | 1.99 | 3.4964e-10 | 1.98 |
| M | ||||||||
|---|---|---|---|---|---|---|---|---|
| 8 | 23 | 3.3799e-06 | – | 1.3300e-06 | – | 1.3815e-06 | – | |
| 16 | 65 | 1.1898e-07 | 4.82 | 2.1456e-07 | 2.63 | 3.0808e-08 | 5.48 | |
| 32 | 182 | 5.3530e-09 | 4.47 | 3.1650e-08 | 2.76 | 1.9968e-09 | 3.94 | |
| 64 | 513 | 2.8116e-10 | 4.25 | 4.2935e-09 | 2.88 | 4.6661e-10 | 2.09 | |
| 128 | 1449 | 3.6421e-11 | 2.94 | 5.5870e-10 | 2.94 | 7.2068e-11 | 2.69 | |
| 256 | 4097 | 6.5222e-12 | 2.48 | 7.1243e-11 | 2.97 | 9.8501e-12 | 2.87 | |
| 512 | 11586 | 9.2923e-13 | 2.81 | 8.9930e-12 | 2.98 | 1.2345e-12 | 2.99 |
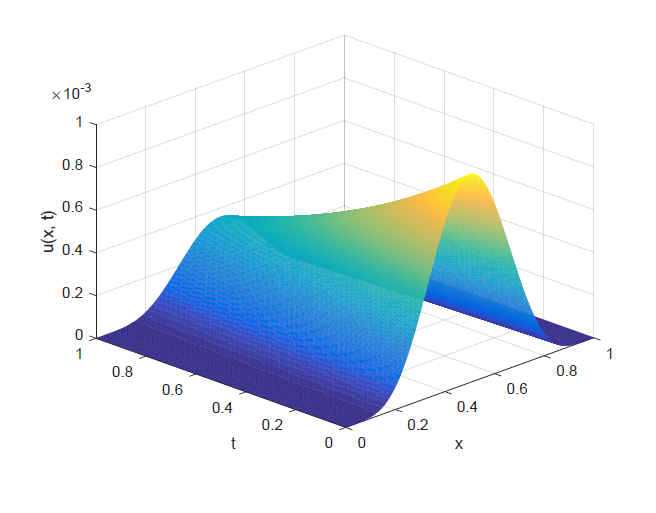
Both Table 1 and Table 2 confirm convergence orders, unconditional stability, and the accuracy of the second and third schemes, respectively. Furthermore, Fig. 1 exhibits the surface plot of the exact solution of the fractional diffusion equation in Example 20 over the domain .
6. Conclusion
In this paper, we present two new approximations for fractional derivatives, utilizing a recently developed unified explicit form. The first approximation achieves second-order accuracy, while the second approximation demonstrates third-order accuracy, derived from the former using a quasi-compact technique. These approximations were employed, together with the Crank-Nicholson method, to solve the space fractional diffusion equation. The unconditional stability and convergence of the resulting Crank-Nicholson schemes were established for fractional derivatives of order in the interval . Furthermore, numerical results confirm the unconditional stability and convergence orders.
References
- [1]
- [2] J. S. Jacob, J. H. Priya and A. Karthika, Applications of fractional calculus in science and engineering, J. Crit. Rev, 7 (2020) no. 13, pp. 4385–4394. https://www.jcreview.com/admin/Uploads/Files/624890460526e8.90194993.pdf
- [3] H. M. Nasir and K. Nafa, Algebraic construction of a third order difference approximation for fractional derivatives and applications, ANZIAM Journal, 59 (2018) no. EMAC2017, pp. C231–C245. https://doi.org/10.21914/anziamj.v59i0.12592
- [4] H. M. Nasir and K. Nafa, A new second order approximation for fractional derivatives with applications, SQU Journal of Science, 23 (2018) no. 1, pp. 43-55. https://doi.org/10.24200/squjs.vol23iss1pp43-55
- [5] C. Lubich, Discretized fractional calculus, SIAM J. Math. Anal., 17 (1986) no. 3, pp. 704–719. https://doi.org/10.1137/0517050
- [6] I. Podlubny, Fractional differential equations: an introduction to fractional derivatives, fractional differential equations, to methods of their solution and some of their applications, Elsevier, 1998.
- [7] A. Akgül and S. H. A. Khoshnaw , Application of fractional derivative on non-linear biochemical reaction models, Int. J. Intell. Netw., 1 (2020), pp. 52–58. https://doi.org/10.1016/j.ijin.2020.05.001
- [8] M. M. Meerschaert and C. Tadjeran, Finite difference approximations for fractional advection–dispersion flow equations, J. Comput. Appl. Math., 172 (2004) no. 1, pp. 65–77. https://doi.org/10.1016/j.cam.2004.01.033
- [9] W.A. Gunarathna, H.M. Nasir and W.B. Daundasekera, An explicit form for higher order approximations of fractional derivatives, Appl. Numer. Math., 143 (2019), pp. 51–60. https://doi.org/10.1016/j.apnum.2019.03.017
- [10] F. Mainardi, Fractional relaxation-oscillation and fractional diffusion-wave phenomena, Chaos Solitons Fractals, 7 (1996) no. 9, pp. 1461–1477. https://doi.org/10.1016/0960-0779(95)00125-5
- [11] R.L. Bagley and P.J. Torvik, A theoretical basis for the application of fractional calculus to viscoelasticity, J. Rheol., 27 (1983) no. 3, pp. 201–210. https://doi.org/10.1122/1.549724
- [12] B.M. Vinagre, I. Podlubny, A. Hernandez and V Feliu, Some approximations of fractional order operators used in control theory and applications, Fractional calculus and applied analysis, 3 (2000) no. 3, pp. 231–248.
- [13] R. Metzler and J. Klafter, The restaurant at the end of the random walk: recent developments in the description of anomalous transport by fractional dynamics, J. Phys. A Math. Gen., 37 (2004) no. 31, pp. R161. http://dx.doi.org/10.1088/0305-4470/37/31/R01
- [14] W. A. Gunarathna, H. M. Nasir and W. B. Daundasekara, Quasi-compact fourth-order approximations for fractional derivatives and applications, Ceylon J. Sci., 51 (2022) no. 5, pp. 589-595. https://doi.org/10.4038/cjs.v51i5.8085
- [15] H.G. Sun, Y. Zhang, D. Baleanu, W. Chen and YQ Chen, A new collection of real world applications of fractional calculus in science and engineering, Commun. Nonlinear Sci. Numer. Simul., 64 (2018), pp. 213–231. https://doi.org/10.1016/j.cnsns.2018.04.019
- [16] Y. Zhang, H.G. Sun, H.H. Stowell, M. Zayernouri and S.E. Hansen, A review of applications of fractional calculus in Earth system dynamics, Chaos Solitons Fractals, 102 (2017), pp. 29–46. https://doi.org/10.1016/j.chaos.2017.03.051
- [17] A.D. Obembe, H.Y. Al-Yousef, M.E. Hossain and S.A. Abu-Khamsin, Fractional derivatives and their applications in reservoir engineering problems: A review, J. Pet. Sci. Eng., 157 (2017), pp. 312–327. https://doi.org/10.1016/j.petrol.2017.07.035
- [18] M. Khan, A. Rasheed, M.S. Anwar and S.T.H. Shah, Application of fractional derivatives in a Darcy medium natural convection flow of MHD nanofluid, Ain Shams Eng. J., 14 (2013) no. 9. p. 102093. https://doi.org/10.1016/j.asej.2022.102093
- [19] H.M. Nasir, B.L.K. Gunawardana and H.M.N.P. Abeyrathna A second order finite difference approximation for the fractional diffusion equation, Int. J. Appl. Comput. Math., 3 (2013) no. 4, pp. 237–243. https://doi.org/10.7763/ijapm.2013.v3.212
- [20] C. Tadjeran, M.M. Meerschaert and H.P. Scheffler, A second-order accurate numerical approximation for the fractional diffusion equation, J. Comput. Phys., 213 (2006) no. 1, pp. 205–213. https://doi.org/10.1016/j.jcp.2005.08.008
- [21] W.Y. Tian, H. Zhou and W. Deng, A class of second order difference approximations for solving space fractional diffusion equations, Math. Comp., 84 (2015) no. 294, pp. 1703–1727. https://doi.org/10.1090/S0025-5718-2015-02917-2
- [22] Z. Hao, Z. Sun and W. Cao, A fourth-order approximation of fractional derivatives with its applications, J. Comput. Phys., 281 (2015), pp. 787–805. https://doi.org/10.1016/j.jcp.2014.10.053
- [23] C. Li and W. Deng, A new family of difference schemes for space fractional advection diffusion equation, Adv. Appl. Math. Mech., 9 (2017) no. 2, pp. 282–306. https://doi.org/10.4208/aamm.2015.m1069
- [24] N.J. Ford and A.C. Simpson, The numerical solution of fractional differential equations: speed versus accuracy, Numer. Algorithms, 26 (2001), pp. 333–346.https://doi.org/10.1023/A:1016601312158
- [25] N. Laskin, Fractional market dynamics, Phys. A, 287 (2000) nod. 3-4, pp. 482–492. https://doi.org/10.1016/S0378-4371(00)00387-3
- [26] E.K. Akgül, A. Akgül and M. Yavuz, New illustrative applications of integral transforms to financial models with different fractional derivatives, Chaos Solitons Fractals, 146 (2021), pp. 110877. https://doi.org/10.1016/j.chaos.2021.110877
- [27] R. Metzler and J. Klafter, The random walk’s guide to anomalous diffusion: a fractional dynamics approach, Phys. Rep., 339 (2000) no. 1, pp. 1–77. https://doi.org/10.1016/S0370-1573(00)00070-3
- [28] R. Hilfer, Applications of fractional calculus in physics, World scientific, 2000. https://doi.org/10.1142/9789812817747
- [29] A. Boukhouima, K. Hattaf, E.M. Lotfi, M. Mahrouf, D.F.M. Torres and N. Yousfi, Lyapunov functions for fractional-order systems in biology: Methods and applications, Chaos Solitons Fractals, 140 (2020), pp. 110224. https://doi.org/10.1016/j.chaos.2020.110224
- [30] E.F.D. Goufo, M. Mbehou and M.M.K. Pene, A peculiar application of Atangana–Baleanu fractional derivative in neuroscience: Chaotic burst dynamics, Chaos Solitons Fractals, 115 (2018), pp. 170–176. https://doi.org/10.1016/j.chaos.2018.08.003
- [31] W.A. Gunarathna, H.M. Nasir and W.B. Daundasekera, A unified explicit form for difference formulas for fractional and classical derivatives and applications, Comput. Methods Differ. Equ., 2024. https://doi.org/10.22034/cmde.2023.58229.2459
- [32] R.H. Chan, Toeplitz preconditioners for Toeplitz systems with nonnegative generating functions, IMA J. Numer. Anal., 11 (1991) no. 3 pp. 333–345. https://doi.org/10.1093/imanum/11.3.333
- [33] A. Quarteroni, R. Sacco and F. Saleri, Numerical Mathematics, Springer Science & Business Media, 37 (2010).
- [34] L. Zhao and W. Deng, A series of high-order quasi-compact schemes for space fractional diffusion equations based on the superconvergent approximations for fractional derivatives, Numer. Methods Partial Differential Equations, 31 (2015) no. 5, pp. 1345–1381. https://doi.org/10.1002/num.21947







