Abstract
The purpose of the article is to highlight the role of binomial polynomials in the construction of classes of positive linear approximation sequences on Banach spaces. Our results aim to introduce and study an integral extension in Kantorovich sense of these binomial operators, which are useful in approximating signals in ([0,1]) spaces, ≥1. Also, inspired by the coincidence index that appears in the definition of entropy, a general class of discrete operators related to the squared fundamental basis functions is under study. The fundamental tools used in error evaluation are the smoothness moduli and Peetre’s K-functionals. In a distinct section, numerical applications are presented and analyzed.
Authors
Octavian Agratini
Tiberiu Popoviciu’ Institute of Numerical Analysis, Romanian Academy, Cluj-Napoca, Romania
Maria Crăciun
Tiberiu Popoviciu’ Institute of Numerical Analysis, Romanian Academy, Cluj-Napoca, Romania
https://ictp.acad.ro/craciun
Keywords
binomial polynomial; umbral calculus; linear positive operator; r-modulus of smoothness; Peetre’s K-functionals; Kantorovich-type operator; Hardy–Littlewood maximal operator; index of coincidence
Paper coordinates
O. Agratini, M. Crăciun, Linear approximation processes based on binomial polynomials, Mathematics, 13 (2025) no. 15, art. no. 2413, https://doi.org/10.3390/math13152413
About this paper
Print ISSN
Online ISSN
2227-7390
google scholar link
Preprint in HTML form
Linear Approximation Processes Based on Binomial Polynomials
Tiberiu Popoviciu Institute of Numerical Analysis,Romanian Academy,
P.O. Box 68-1, 400110 Cluj-Napoca, Romania
Abstract
The purpose of the article is to highlight the role of binomial polynomials in the construction of classes of positive linear approximation sequences on Banach spaces. Our results aim to introduce and study an integral extension in Kantorovich sense of these binomial operators, which are useful in approximating signals in spaces, . Also, inspired by the coincidence index that appears in the definition of entropy, a general class of discrete operators related to the squared fundamental basis functions is under study. The fundamental tools used in error evaluation are the smoothness moduli and Peetre’s K-functionals. In a distinct section, numerical applications are presented and analyzed.
Keywords: binomial polynomial; umbral calculus; linear positive operator; r-modulus of smoothness; Peetre’s K-functionals; Kantorovich-type operator; Hardy–Littlewood maximal operator;index of coincidence
MSC 41A36; 41A25
1 Introduction
The roots of this paper are based on binomial polynomials, which have their origin in the so-called Heaviside calculus created by G. Boole. We point out that the first rigorous version of this calculus belongs to Gian-Carlo Rota and his collaborators, see for example, [1, 2]. To achieve a self-contained exposition, we will recall the notions of a polynomial sequence of binomial type and some facts needed in the subsequent analysis accompanied by several examples. Thus, we arrive at the main part of the paper: applications of the binomial sequences in the construction of linear approximation processes. In particular cases, some classical operators are highlighted. We will examine new extensions of these operators, both integral in the Kantorovich sense and connected with squared fundamental functions, proving approximation properties of the new constructions.
We mention the role of binomial polynomials in Approximation Theory by exploiting the technique of the umbral calculus or symbolic calculus. This calculus is a successful combination of the differences among calculus and certain chapters of Functional Analysis and Probability Theory. We emphasize that this kind of study is still in the spotlight of many papers. Through the integral constructions presented in the manuscript, we manage to approximate functions from larger normed spaces. In other recent works, various methods were employed to solve linear and nonlinear differential equations with the help of bases generated by some specific polynomials.
Considering an interval, we work in different spaces: the space of continuous real-valued functions defined on , the space of all -th power integrable functions on . The main tools used are the r-modulus of smoothness, K-functional, and Hardy–Littlewood maximal operator. In a separate section, the theoretical aspects are complemented by numerical examples that confirm our results.
2 Preliminaries
Set . For any , we denote by the linear space of polynomials of degree no greater than and by the set of all polynomials of degree . In our study, we only consider polynomials with real coefficients. We set
which represents the commutative algebra of polynomials with coefficients on the field .
A sequence such that for every is called a polynomial sequence.
Definition 1.
A polynomial sequence is of binomial type if for any the following equality
| (1) |
holds.
Remark 1.
Knowing that , we obtain for any and by induction we obtain for any .
The trivial example of the binomial sequence is , . Some nontrivial examples are given below:
(i) The generalized factorial power with step :
,
Particular cases: for , we obtain the lower-factorials denoted by ; for , we obtain the upper-factorials denoted by .
(ii) Touchard polynomials: ,
where represent the Stirling numbers of the second kind defined by
The Dobinski formula says
see [1].
(iii) Abel polynomials: ,
(iv) Gould polynomials: ,
In what follows, set as the space of all linear operators . For a given , stands for the shift operator defined by the relation
Definition 2.
An operator , which is switched with all shift operators, that is , , is called a shift-invariant operator.
The class of these operators is denoted by .
Definition 3.
An operator is called a delta operator if and is a nonzero constant.
Let denote the set of all delta operators.
According to [2] (Proposition 2), for every , we have
We present some well-known examples of delta operators. Here, stands for the identity operator on the space .
(i) The derivative operator, denoted by .
(ii) The operators used in calculus with divided differences. Let be a fixed number. We set
representing the forward difference, the backward difference, and the central difference operator, respectively.
(iii) Abel operator , . For any ,
Writing Taylor’s series in the following manner
we can also get .
(iv) Touchard operator
for any polynomial, with the sum being finite.
Another representation of this operator is based on divided differences as follows
(v) Gould operator, , .
Definition 4.
Let be a delta operator. A polynomial sequence is called the sequence of basic polynomials associated with if
(i) for any ;
(ii) for any ;
(iii) for any .
Remark 2.
If is a sequence of basic polynomials associated with , then is a basis of the vectorial space . Taking this fact into account, by induction, it can be proved [2] (Proposition 3) that every delta operator has a unique sequence of basic polynomials.
For example, , , and represent the sequence of basic polynomials associated with , , and , respectively. Also, and are the sequence of basic polynomials associated with the Abel operator and Gould operator .
We conclude this paragraph by presenting the connection between the delta operator and the binomial type sequences.
Theorem 1 ([2], Theorem 1).
(a) If is a basic sequence for some delta operator , then it is a sequence of binomial type.
(b) If is a sequence of binomial type, then it is a basic sequence for some delta operator.
3 Operators of Binomial Type
We consider a delta operator and its sequence of basic polynomials . For every , we consider the operator defined as follows
| (2) |
According to Sablonierre [3], they are called Bernstein–Sheffer operators , but as Stancu and Occorsio stated [4], these operators can be named Popoviciu operators because, in fact, they were first defined in a note published by T. Popoviciu [5].
Remark 3.
Since any compact interval is isomorphic to , the use of this compact interval does not restrict the usefulness of the operators.
The operators , , are linear and reproduce the constants. Indeed, choosing in (1), we obtain . Moreover, these operators interpolate functions at the ends of their domain.
The positivity of these operators is given by the sign of the coefficients of the series . More precisely, Popoviciu [5], and later Sablonniere [3] (Theorem 1),
have established
Lemma 1.
is a positive operator on for every if and only if and for all .
We specify that the above series is connected with a sequence of basic polynomials by the relation
see [2] (Corollary 3). In what follows, we point out significant results of the operators defined by (2), see, e.g., [3] (Theorems 2 and 3).
Theorem 2.
If the operators , , defined by (2) satisfy the conditions of Lemma 1, then the following statements are true:
(i) is an isomorphism of preserving the degree, i.e., whenever , .
(ii) The behavior of operators on Korovkin test functions is as follows
| (3) |
| (4) |
where , the sequence being generated by
| (5) |
(iii) converges uniformly to if and only if the condition
| (6) |
holds.
(iv) If
| (7) |
then there exists an integer for which , and we have
In the above, is the sup-norm of the Banach space , and is the first modulus of continuity of . We recall
| (8) |
We specify that relations (3) imply that the operators reproduce affine functions; consequently, they are of Markov type.
Remark 4.
Choosing certain particular cases of delta operators in (2) already presented in the previous section, we reobtain some classical linear positive operators of a discrete type.
(i) In the case , we obtain the well-known Bernstein operators. In this case, (4) becomes
Statement (iv) of Theorem 2 shows that the Bernstein operators , could be considered as the best positive operators of binomial type associated with any function .
(ii) If , , the basic polynomials were indicated as
In this case, become Stancu operators [6] denoted by
where
being a parameter which may depend only on the natural number . We have
(iii) If is an Abel operator, assuming that the parameter is non-positive and depends on , , one obtains the Cheney–Sharma operators [7]. If converges to zero, then converges to the identity operator of the space .
Definition 5.
Let belong to , and let be the multiplication operator defined as follows , . The operator is called the Pincherle derivative of .
For example, by using this definition, we get , , .
A slight modification of the operators defined by (2) was given by Lupaş [8]. They have the following display
These are also of Markov type and
where
see [8] (Equation (3)). We recall that is invertible (First Isomorphism Theorem, [2]).
For an operator acting between metric spaces , , a topic of study is determining the limit of the sequence of its iterates , where
The study was carried out for different classes of binomial operators, see, e.g., [9] (p. 562), where .
To the best of our knowledge, the Lupaş operators defined above have not been treated so far. As a new example based on the result from [9] (Theorem 5), we get
for each , where .
4 An Integral Extension of Binomial Operators
In Ref. [10], we modified the operator into an integral form of Kantorovich sense, the advantage of the construction allowing it to approximate any integrable function. These new operators are described as follows:
| (9) |
where
| (10) |
We reiterate that the assumptions of Lemma 1 are maintained throughout the entire paper.
After the variant in (9), using Sheffer sequences, another Kantorovich construction for the operators considered in [11] was studied in [12], with the results being obtained for functions belonging to .
For , becomes the genuine Kantorovich operator, see, e.g., [13] (Section 5.3.7). The Kantorovich-type generalized operators use mean values of on suitable intervals and consequently perform better than the classical discrete operators that use node networks.
First, we are taking the following information from [10] (Lemma 1)
| (11) |
where , and the sequence is indicated by (5).
The above identities are useful in establishing the first three central moments of the operators, defined as follows
By an easy calculation, we obtain
| (12) |
Since occurs, from relation (12), we obtain
| (13) |
In what follows, we will work in the space , endowed with the usual norm
Our aim of this section is to establish an upper bound of approximation error by using the first modulus of smoothness of measured in spaces, .
We recall
Also, another tool we use is the K-functional of defined for each as follows
where , see Peetre [14]. Here, the space consists of those functions on for each of the first derivatives that are absolutely continuous on , and the derivative belongs to . Also, Johnen [15] (Equation (6.2)) -functional defined by
The following connections between these functionals and the modulus of smoothness are valid [15] (Equations (6.3) and (6.4))
| (14) |
where and are positive constants depending only on .
Theorem 3.
Proof.
In the first stage, we prove
| (16) |
for any and , where is a constant depending only on . To achieve this, we use the Hardy–Littlewood maximal operator defined for any and as follows
| (17) |
For it is bounded in , thus we can write
| (18) |
. being a constant depending only on , see, e.g., [16] (Chapter 1, Theorem 1). By using (17), we can write
Using the Cauchy–Schwarz inequality for both integrals and sums, we get
Based on (13), we conclude
5 Operators Involving Squared Binomial Polynomials
We present a general class of discrete operators related to the squared binomial basis polynomials. They have the following form
| (19) |
where , is defined by (10).
We are working on the natural hypothesis that , for all . There is currently a growing interest in studying these classes of operators.
Obviously, they are linear and positive operators. Without involving delta operators, constructions described by (19) have already appeared in the literature, for example, see Abel’s paper [18], who obtained a complete asymptotic expansion of these discrete operators.
In the particular case , the operators defined by (19) arise from the Bernstein operators. were investigated by Herzog [19], and later, new properties were revealed by Gavrea and Ivan [20] and Holhoş [21].
Remark 6.
The proposed new operators can be correlated with Probability Theory. A discrete probability distribution is associated with the index of coincidence , see [22] (Equation 1), which is used in the definition of entropy. For example, if the random variable follows the binomial distribution with parameters and , the probability mass function is of the form
and its index of coincidence is given by , which is exactly the expression that appears in .
We propose to indicate an upper bound of the convergence rate of the new sequence towards the identity operator in the space .
Theorem 4.
Proof.
Returning to and operators, based on (3) and (4), we get
Keeping the assumptions that appear in Theorem 2 (iv), that is
further, we use [18] (Lemma 1) from which we extract the following statement: for any (arbitrary small number) , the second central moment of the operators denoted by satisfies the estimate
Choosing , a constant exists such that for sufficiently large ,
| (20) |
To obtain a quantitative result of the error of approximation by using the modulus of continuity defined at (8), we apply the following inequality based on the paper of Shisha and Mond [23]: if is a linear positive operator defined on , then it takes place
for every and . Here, , . Taking into account that , the above relation correlated with (20) and selecting , we arrive at
for sufficiently large . By applying , the conclusion of the theorem is proven. ∎
Corollary 1.
Proof.
We emphasize that this established result avoided the use of the Bohman–Korovkin theorem, i.e., the calculation of the first and second order moments.
Similarly to the integral extension applied to , , operators, we can realize the Kantorovich variant of the class defined by relation (19). Its expression will have the following form
| (21) |
where
| (22) |
Obviously, they are positive linear operators.
Theorem 5.
Proof.
First, we calculate the first three moments of the introduced operators. Clearly,
| (23) |
We will express the next two moments using the , operators. By direct calculation, we easily obtain
| (24) | ||||
| (25) |
On the other hand, the following classes of functions are nested as follows:
Since is dense in , we utilize [13](Theorem 4.2.3, Corollary 4.17), and the statement of our theorem is proven. ∎
Finally, we make a reference to -stability of localized integral operators for any . It is known that a bounded operator on is said to have -stability if there exists a positive constant such that
see, e.g., [24].
6 Numerical Results
For the sake of clarity, in this section, in tables and figures, we will use the following simpler notations for special cases of operators belonging to the classes of operators discussed in the previous sections:
-
•
for binomial operators (defined by relation (2)):
-
–
(classical Bernstein operator)
-
–
(Stancu operator)
-
–
(Cheney–Sharma operator)
-
–
-
•
for the Kantorovich form of the binomial operators (defined by the relation (9))
-
–
(classical Kantorovich operator),
-
–
(Stancu–Kantorovich operator),
-
–
(Cheney–Sharma–Kantorovich),
-
–
-
•
for operators involving squared binomials (defined by the relation (19))
-
–
(modified Bernstein),
-
–
(modified Stancu),
-
–
(modified Cheney–Sharma).
-
–
-
•
for the Kantorovich variant of the operators involving squared binomials (defined by the relation (21))
-
–
(modified Bernstein–Kantorovich),
-
–
(modified Stancu–Kantorovich), and
-
–
(modified Cheney–Sharma–Kantorovich).
-
–
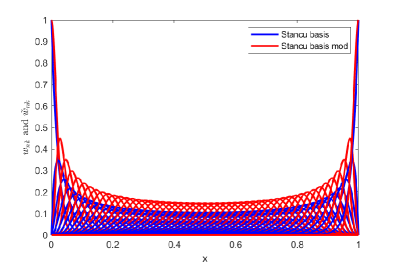
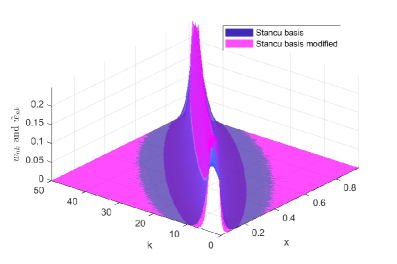
In Figure 1, we present the Stancu basis and the Stancu basis modified for , while in Figure 2, we represent the same basis but in 3D and only for . We note that due to the form of the modified basis, the modified Stancu operators at point x give higher weights to values closer to x and lower weights to values farther apart compared to the classical operators. This behavior is evident in the sharper peaks of the modified basis functions, which are more localized around their respective positions. We mention that this feature also applies to the other modified operators compared to the binomial classical ones, because the weights defined by the relation (22) have a form similar to compared to the corresponding weights . This can be an advantage for certain functions and a disadvantage for others. For example, for functions that have a slower variation near the ends of the interval and faster in the rest, the residuals of the modified binomial operators are smaller than those of the classical binomial operators, which is illustrated in the following figures.
6.1 Example 1
This example refers to the approximation of the function
| (26) |
using binomial operators and modified binomial operators. First, in Figure 3, we present the shape of this function, the Stancu operators and modified Stancu operators with squared binomial polynomials for , , and for this function. We observe that the modified Stancu operators with squared binomial polynomials (plotted with dashed line) have a better approximation than the classical Stancu operators (plotted with continuous line) for the same , in this case, being closer to the function for almost all values of .
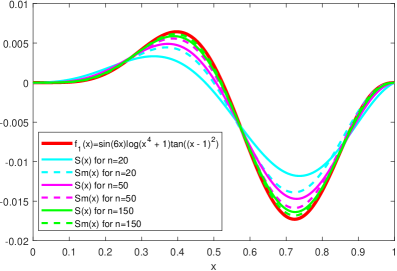
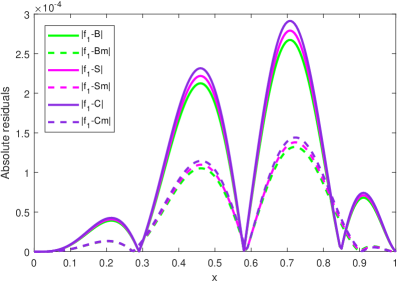
Figure 4 shows the absolute residual values for the operators: classical Bernstein (), modified Bernstein (), classical Stancu (), modified Stancu (), classical Cheney–Sharma (), and modified Cheney–Sharma () applied to the function defined by (26). First, we can see that the global maximum error for all operators occurs at the minimum point of the function , that is, at , and the second maximum of the absolute residuals occurs at the maximum point of the function . The minima for the classical binomial operators occur at the inflection points of the function, i.e., at , , and , while for the modified operators, the first minimum of the error is before the first inflection point and the last one is after the last inflection point. This is due to the fact that the operators are convex linear combinations of the values of the function so that in the convexity areas of the function, the values of the operators are higher than the values of the function and in the concavity areas, the values of the operators are lower than the values of the function, and then the residual changes the sign around the inflection points of . We observe that the absolute residuals of the modified binomial operators are significantly smaller than those of their classical counterparts for almost all values of (except for a few values around the inflection points of the function), so this function is better approximated by these operators. The same conclusion can be drawn from Table 1, where we have analyzed the absolute values of the residuals for the classical operators and for the modified ones for x from 0 to 1 with step 0.1. We mention that the values for the residuals for and for are 0 because all these operators interpolate the ends of the interval . In the interior of this interval for most values of , the absolute residual values of the modified operators are significantly lower than the absolute residuals of the classical operators. For example, at , the residual for is approximately of the residual for . Also, at this point, the residual for is approximately of the residual for . At , the residual for is approximately of the residual for , and the residual for is approximately of the residual for . At , the residual for is approximately of the residual for , and the residual for is approximately of the residual for . These ratios demonstrate that modified operators generally provide better approximation performance for this function, especially near the endpoints of the interval.
| x | ||||||
|---|---|---|---|---|---|---|
| 0.0 | 0 | |||||
| 0.1 | ||||||
| 0.2 | ||||||
| 0.3 | ||||||
| 0.4 | ||||||
| 0.5 | ||||||
| 0.6 | ||||||
| 0.7 | ||||||
| 0.8 | ||||||
| 0.9 | ||||||
| 1.0 |
//
We mention that the run time on an HP computer having an Intel(R) Core(TM) i5-6500 CPU @ 3.20 GHz processor for computing the values of the operators and applied to on 500 values of was: 1.77 s for , 5.29 s for , and t = 8.48 s for . Similar run times were obtained for the other operators studied in this paper.
6.2 Example 2
In our second example, we analyze the approximation of the function
| (27) |
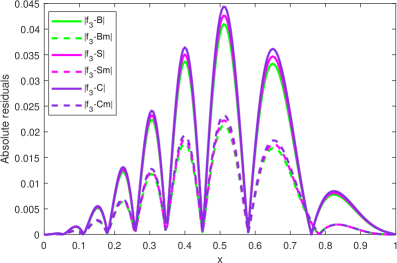
using binomial operators and modified binomial operators. Figure 5 shows the absolute residual values for this function for the binomial operators Bernstein, Stancu, and Cheney–Sharma and for their modified versions involving squared binomial polynomials (, , and ). Similarly to the behavior discussed for Figure 4, we can see that the global maximum error for all operators occurs at the maximum point of the function , that is, at x = 0.5. The minima of the error for the classical binomial operators occur at the inflection points of the function, i.e., at and , while for the modified operators, the first minima of the error is before the first inflection point and the second one is after the second inflection point. We observe that the absolute residuals of the modified binomial operators are much smaller than those of the classical operators for almost all values of (except for a small interval around 0.3 and 0.7, i.e., in the neighborhood of the inflection points of the function), so this function is better approximated by these operators. The same conclusion can be drawn from Table 2, where we have analyzed the absolute values of the residuals for the classical binomial operators and for the modified ones for x from 0 to 1 with step 0.1 (see also the first four columns of Table 4). We can remark that for the values of x in and , the errors for modified operators are less than a quarter of the errors for classical binomial operators analyzed, indicating better performance of the modified operators near the endpoints. More specifically, at , the residuals for the modified operators range from approximately 9% to 12.5% of the residuals for the classical operators, at , the residuals for the modified operators are less than 13% of the residuals for the classical operators and at , the residuals for the modified operators are less than 23% of the residuals for the classical operators. Around and , the ratios of the absolute residuals are around 2, indicating that the modified operators perform worse than the classical ones in the region around the inflection points of the function. At x = 0.5, the ratios are approximately 0.5, which shows that the modified operators reduce the residuals by about 50% at the global maximum of the function. So, the modified operators (, , ) generally exhibit smaller residuals compared to their classical counterparts (, , ) for most values of x for this function.
| x | ||||||
|---|---|---|---|---|---|---|
| 0.0 | ||||||
| 0.1 | ||||||
| 0.2 | ||||||
| 0.3 | ||||||
| 0.4 | ||||||
| 0.5 | ||||||
| 0.6 | ||||||
| 0.7 | ||||||
| 0.8 | ||||||
| 0.9 | ||||||
| 1.0 |
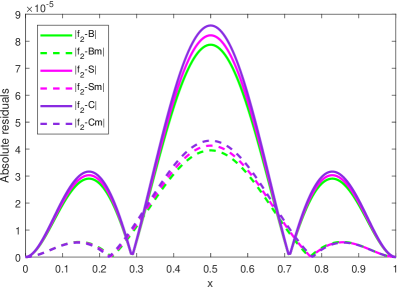
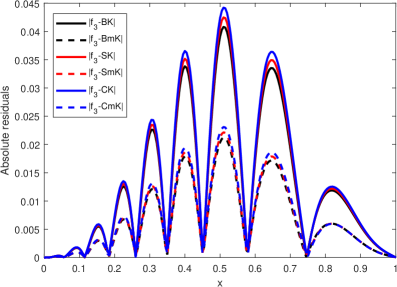
Figure 6 and Table 3 compare the absolute residuals for the classical binomial Kantorovich operators and for those involving squared binomial polynomials. We remark that at endpoints, we have very small but non-zero residuals () for all operators, since Kantorovich-type operators do not interpolate endpoints exactly. For all interior points, the modified Kantorovich operators with quadratic binomial polynomials consistently produce residuals about half the size of classical versions, so the conclusion we can draw is that the latter approximate this function better than the others.
| x | ||||||
|---|---|---|---|---|---|---|
| 0.0 | ||||||
| 0.1 | ||||||
| 0.2 | ||||||
| 0.3 | ||||||
| 0.4 | ||||||
| 0.5 | ||||||
| 0.6 | ||||||
| 0.7 | ||||||
| 0.8 | ||||||
| 0.9 | ||||||
| 1.0 |
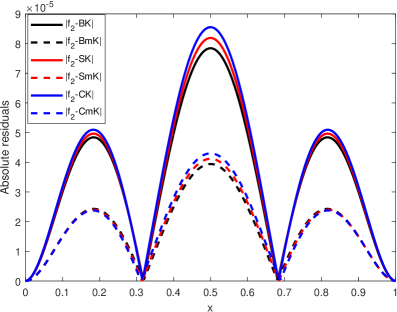
Table 4 presents the ratios between the absolute residuals for modified operators and their classical counterparts applied to the function for different values of (from 0.1 to 0.9, with a step of 0.1). The columns from 2 to 4 display ratios for three types of modified operators versus classical ones,
while columns from 5 to 7 show similar ratios, but for the modified Kantorovich type versus the classical Kantorovich ones, i.e.,
Blue values are values smaller than one, indicating smaller residuals for the modified operators, suggesting better approximations, while red values indicate larger residuals for modified operators, suggesting less accurate approximations.
| x | ||||||
|---|---|---|---|---|---|---|
| 0.1 | 0.2289 | 0.2172 | 0.2054 | 0.4998 | 0.4846 | 0.4698 |
| 0.2 | 0.1252 | 0.1089 | 0.0927 | 0.5024 | 0.4837 | 0.4645 |
| 0.3 | 1.9430 | 2.0023 | 2.0602 | 0.5060 | 0.4360 | 0.3572 |
| 0.4 | 0.5536 | 0.5560 | 0.5583 | 0.5021 | 0.5070 | 0.5120 |
| 0.5 | 0.5022 | 0.5023 | 0.5024 | 0.5026 | 0.5026 | 0.5027 |
| 0.6 | 0.5536 | 0.5560 | 0.5583 | 0.5021 | 0.5070 | 0.5120 |
| 0.7 | 1.9430 | 2.0023 | 2.0602 | 0.5060 | 0.4360 | 0.3572 |
| 0.8 | 0.1252 | 0.1089 | 0.0927 | 0.5024 | 0.4837 | 0.4645 |
| 0.9 | 0.2289 | 0.2172 | 0.2054 | 0.4998 | 0.4846 | 0.4689 |
6.3 Example 3
In this example, we consider the following function
| (28) |
that exhibits several local extrema, allowing us to further illustrate the strengths and limitations of the operators discussed. The comparison will focus on the accuracy of the classical and modified operators, as well as their Kantorovich variants, in approximating this function across the interval .
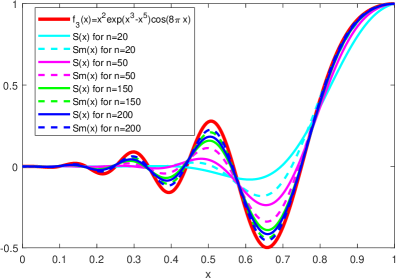
Figure 7 presents the shape of the function , along with the Stancu operators and modified Stancu operators with squared binomial polynomials for . The function has three maxima and three minima in the interior of the interval . Analogously to the other functions, analyzing the absolute residuals of the function in Figure 8, we can see that the maxima of the error for all operators occur at the extrema points of the function . Modified Stancu operators (dashed lines) show a closer approximation to the function than the classical Stancu operators (solid lines) for the same . Moreover, for example, the modified operator for performs better than the classical operator for . Similar conclusions can be drawn for the other modified operators compared to the classical ones.
| x | ||||||
|---|---|---|---|---|---|---|
| 0.0 | ||||||
| 0.1 | ||||||
| 0.2 | ||||||
| 0.3 | ||||||
| 0.4 | ||||||
| 0.5 | ||||||
| 0.6 | ||||||
| 0.7 | ||||||
| 0.8 | ||||||
| 0.9 | ||||||
| 1.0 |
Figure 8 displays the absolute residuals for the classical and modified operators (Bernstein, Stancu, Cheney–Sharma, and their modified versions) when approximating the function for . The plot shows that, for almost all values of , the modified operators (those involving squared binomial polynomials) yield significantly smaller absolute residuals compared to their classical counterparts. The largest errors for all operators are observed at the extrema of the function, while the residuals are minimized near the endpoints and at certain interior points. This figure and Table 5 show that the modified operators provide a more accurate approximation of across most of the interval, especially near the endpoints, with the exception of small neighborhoods around inflection points (visible in the figure before , i.e, in the vicinity of the last inflection point of this function in [0, 1]), where the classical operators perform similarly or slightly better. A similar behavior can be seen in Figure 9, which displays the absolute residuals for the classical binomial Kantorovich operators (BK, SK, CK) and their modified counterparts involving squared binomial polynomials (BmK, SmK, CmK) when approximating the function , defined by Equation (28) for (see also Table 6 and the last three columns of Table 7).
| x | ||||||
|---|---|---|---|---|---|---|
| 0.0 | ||||||
| 0.1 | ||||||
| 0.2 | ||||||
| 0.3 | ||||||
| 0.4 | ||||||
| 0.5 | ||||||
| 0.6 | ||||||
| 0.7 | ||||||
| 0.8 | ||||||
| 0.9 | ||||||
| 1.0 |
Table 7, similar to Table 4, presents the ratios of absolute residuals for modified operators to their classical counterparts, evaluated for the function (denoted by etc.) at points from 0.1 to 0.9 in steps of 0.1. All ratios for these points are less than 1 (displayed in blue), indicating that the modified operators consistently produce smaller absolute residuals than their classical counterparts for all values shown. The ratios are generally between 0.15 and 0.56, showing a significant reduction in residuals. The lowest ratios occur at and for versus , versus , and versus , showing that modified operators are especially effective at these points. The Kantorovich-type ratios are also below 1, in fact, they are below 0.56, but tend to be slightly higher than the corresponding non-Kantorovich ratios, indicating a smaller (but still present) improvement. The modified operators outperform their classical counterparts in terms of absolute residuals across the interval [0, 1] for the function defined by the relation (28), the improvement being more pronounced at higher values.
| x | ||||||
|---|---|---|---|---|---|---|
| 0.1 | 0.4131 | 0.4089 | 0.4048 | 0.5529 | 0.5458 | 0.5388 |
| 0.2 | 0.5541 | 0.5561 | 0.5581 | 0.5144 | 0.5182 | 0.5219 |
| 0.3 | 0.5308 | 0.5321 | 0.5335 | 0.5326 | 0.5339 | 0.5351 |
| 0.4 | 0.5256 | 0.5268 | 0.5280 | 0.5287 | 0.5297 | 0.5308 |
| 0.5 | 0.5210 | 0.5219 | 0.5229 | 0.5212 | 0.5221 | 0.5231 |
| 0.6 | 0.4767 | 0.4757 | 0.4748 | 0.5213 | 0.5188 | 0.5163 |
| 0.7 | 0.5546 | 0.5569 | 0.5591 | 0.5027 | 0.5076 | 0.5124 |
| 0.8 | 0.1837 | 0.1696 | 0.1554 | 0.5080 | 0.4911 | 0.4741 |
| 0.9 | 0.2323 | 0.2207 | 0.2091 | 0.4979 | 0.4826 | 0.4671 |
6.4 Example 4
In this example, we shall present the approximation of the following function with two jump discontinuities
| (29) |
using the classical Kantorovich and modified Kantorovich operators defined by (9) and (21), respectively.
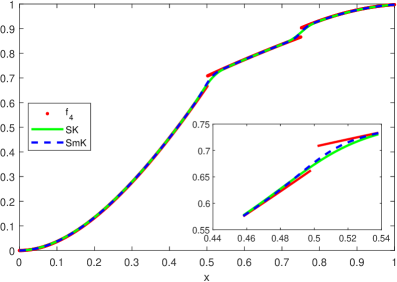
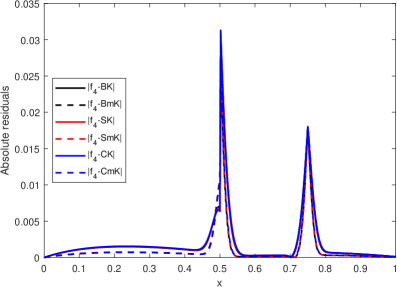
In Figure 10, we represented this function and Stancu–Kantorovich operators and modified Stancu–Kantorovich operators with squared binomial polynomials for applied to this function, while in Figure 11, we plotted the absolute residual values for six operators for .
For better visibility, in the smaller figure inserted in Figure 10, we zoomed in on the zone around the first discontinuity point .
As expected, the maxima of the error occurs at the discontinuity points, and their values are a fraction of the height of the jumps because the operators and their modified versions have a smooth transition from the values located on the left of the discontinuity points to the values situated to the right.
One can observe that for most values of , the residuals for modified Kantorovich operators (plotted with dashed line) are smaller than the residuals for their classical counterparts (plotted with continuous line).
In Table 8, we show the values of the absolute residuals for three classical binomial-type Kantorovich operators and for their modified versions. Besides the values from 0 to 0.9 with step 0.1 displayed in the previous tables, we added the value x = 0.502 situated to the right of the first discontinuity point to emphasize that if the values of the operators , , and at the left of the jump discontinuity point x = 0.5 are closer to the function than the values of , , and , in the right proximity of this point are closer to the function than their classical corresponding ones (because of their smooth transition mentioned above).
| x | ||||||
|---|---|---|---|---|---|---|
| 0.0 | ||||||
| 0.1 | ||||||
| 0.2 | ||||||
| 0.3 | ||||||
| 0.4 | ||||||
| 0.5 | ||||||
| 0.502 | ||||||
| 0.6 | ||||||
| 0.7 | ||||||
| 0.8 | ||||||
| 0.9 | ||||||
| 1.0 |
7 Discussion
The conclusion is that the modified binomial operators are more efficient than the classical ones for approximating functions with specific characteristics, particularly those that exhibit slower variation near the ends of the interval and have fluctuations in the rest. This is because the modified operators at a point situated within the interval [0, 1] (and not very close to the endpoints) give higher weights to values closer to and lower weights to values farther apart compared to the classical operators. For other functions, the results may vary, and further analysis is needed to determine the best operator choice for specific applications. For some values of close to the ends of the interval, the values of the modified weights are more asymmetrical in the sense that for the left end, the values of the weights that multiply the values for located at the left of the point x are much larger than the values of the weights that multiply the values for located at the right of the point x, so the computed values of the modified operators take into account the greater weight values of the function to the left of the current value than those to the right. So, for functions that vary rapidly at the endpoints, this behavior will lead to a deviation of the value of the operator at that point from the value of the function, i.e., to higher residuals. Therefore, for functions with rapid variation near the endpoints, classical operators may yield better results in these areas. Similar observations hold for Kantorovich-type operators. The choice between classical and modified operators should, therefore, be guided by the specific properties of the target function.
As a future direction, we mention that we can define and study similar modified operators for the classes of operators constructed using binomial and Sheffer sequences considered in [11, 12].
Finally, it is important to mention a new active research field in the use of polynomial-type operators to obtain solutions to differential equations. In Ref. [25], the authors combine polynomial approximation to derive a piecewise polynomial representation similar to a spline function. This technique improves the inference on system properties. Using a polynomial LD basis (see Remark 4(i)) in [26], nonlinear partial differential equations that arise in various fields have been solved. In support of our claims, one can also consult [27].
8 Conclusions
The paper is focused on binomial polynomials, and their applications in the construction of linear and positive approximation operators.
Starting from the classical operators, three new classes of discrete or continuous operators are investigated. The results obtained aim at the evaluation of the absolute error in , spaces generated by a Kantorovich integral extension, the introduction of a discrete class involving squared binomial basis polynomials accompanied by the study of uniform convergence in , as well as its generalization in the integral sense with the evaluation of the maximum error, again in spaces.
The numerical results presented contain the approximation of some specific functions using operators belonging to the classes of operators studied. The results obtained are analyzed in detail, highlighting the usefulness of the new sequences and pointing out their pros and cons.
Acknowledgements
During the preparation of this manuscript/study, the second author used the latexTable function of Eli Duenisch (https://github.com/eliduenisch/latexTable) and the copilot from Visual Studio Code, version: 1.102.1. for the purpose of rephrasing the text and describing the tables. The authors have reviewed and edited the output and take full responsibility for the content of this publication.
References
- [1] Mullin, I.R.; Rota, G.-C. On the Foundations of Combinatorial Theory. III. Theory of binomial enumeration. In Graph Theory and Its Applications; Harris, B., Ed.; Academic Press: Cambridge, MA, USA, 1970; pp. 167–213.
- [2] Rota, G.-C.; Kahaner, D.; Odlyzko, A. On the Foundations of Combinatorial Theory. VIII. Finite operator calculus. J. Math. Anal. Appl. 1973, 42, 685–760.
- [3] Sablonniere, P. Positive Bernstein-Sheffer operators. J. Approx. Theory 1995, 83, 330–341.
- [4] Stancu, D.D.; Occorsio, M.R. On approximation by binomial operators of Tiberiu Popoviciu type Rev. Roum. Math. Pures Appl. 1998, 27, 167–181.
- [5] Popoviciu, T. Remarques sur les polynômes binomiaux. Bull. Soc. Sci. Cluj 1931, 6, 146–148; reprinted in Mathematica 1932, 6, 8–10.
- [6] Stancu, D.D. Approximation of functions by a new class of linear operators. Rev. Roum. Math. Pures Appl. 1968, 13, 1173–1194.
- [7] Cheney, E.W.; Sharma, A. On a generalization of Bernstein polynomials. Riv. Math. Univ. Parma 1964, 5, 77–84.
- [8] Lupaş, L.; Lupaş, A. Polynomials of binomial type and approximation operators. Stud. Univ. Babeş-Bolyai Math. 1987, 32, 61–69.
- [9] Agratini, O.; Rus, I.A. Iterates of a class of discrete operators via contraction principle. Comment. Math. Univ. Carolin. 2003, 44, 555–563.
- [10] Agratini, O. On a certain class of approximation operators. Pure Math. Appl. 2000, 11, 119–127.
- [11] Crăciun, M. Approximation operators constructed by means of Sheffer sequences. Rev. Anal. Numér. Théor. Approx. 2001, 30, 135–150.
- [12] Crăciun, M. Note on an approximation operator and its Lipschitz constant, Rev. Anal. Numér. Théor. Approx. 2002, 31, 55–60.
- [13] Altomare, F.; Campiti, M. Korovkin-Type Approximation Theory and Its Applications; de Gruyter Series Studies in Mathematics; Walter de Gruyter: Berlin, Germany; New York, NY, USA, 1994; Volume 17.
- [14] Peetre, J. A Theory of Interpolation of Normed Spaces; Notes Universidade de Brasilia: Brasília, Brazil, 1963.
- [15] Johnen, H. Inequalities connected with the moduli of smoothness. Math. Vesnik 1972, 24, 289–305.
- [16] Stein, E.M. Singular Integrals and Differentiability Properties of Functions; Princeton University Press: Princeton, NJ, USA, 1970.
- [17] Swetits, J.J.; Wood, B. Note on the degree of approximation with positive linear operators. J. Approx. Theory 1996, 87, 239–241.
- [18] Abel, U. Voronovskaja Type Theorems for Positive Linear Operators Related to Squared Fundamental Functions. In Constructive Theory of Functions, Proceedings of the Constructive Theory of Functions, Sozopol, Bulgaria, 2–8 June 2019 ; Draganov, B., Ivanov, K., Nikolov, G., Uluchev, R., Eds.; Prof. Marin Drinov Publishing House of BAS: Sofia, Bulgaria, 2020; pp. 1–21.
- [19] Herzog, F. Heuristische Untersuchungen der Konvergenzrate Spezieller Linearer Approximationsprozesse. Ph.D. Thesis, Friedberg University, Germany 2009.
- [20] Gavrea, I.; Ivan, M. On a new sequence of positive linear operators related to squared Bernstein polynomials. Positivity 2017, 21, 911–917.
- [21] Holhoş, A. Voronovskaya theorem for a sequence of positive linear operators related to squared Bernstein polynomials. Positivity 2019, 23, 571–580.
- [22] Harremoes, P.; Topsoe, F. Inequalities between entropy and index of coincidence derrived from information diagrams. IEEE Trans. Inf. Theory 2001, 47, 2944–2960.
- [23] Shisha, O.; Mond, B. The degree of convergence of linear positive operators. Proc. Natl. Acad. Sci. USA 1968, 60, 1196–1200.
- [24] Shin, C.E.; Sun, Q. Stability of the localized operators. J. Funct. Anal. 2009, 256, 2417–2439.
- [25] Martin, T.; Allgöwer, F. Data-Driven System Analysis of Nonlinear Systems Using Polynomial Approximation. IEEE Trans. Autom. Control 2024, 69, 4261–4274.
- [26] Bhatti, M.I.; Rahman, M.H.; Dimakis, N. Approximate Solutions of Nonlinear Partial Differential Equations Using B-Polynomial Bases. Fractal Fract. 2021, 5, 106.
- [27] El Yazidi, Y.; Ellabib, A. An Efficient Numerical Scheme Based on Radial Basis Functions and a Hybrid Quasi-Newton Method for a Nonlinear Shape Optimization Problem. Math. Comput. Appl. 2022, 27, 67.
- Mullin, I.R.; Rota, G.-C. On the Foundations of Combinatorial Theory. III. Theory of binomial enumeration. In Graph Theory and Its Applications; Harris, B., Ed.; Academic Press: Cambridge, MA, USA, 1970; pp. 167–213. [Google Scholar]
- Rota, G.-C.; Kahaner, D.; Odlyzko, A. On the Foundations of Combinatorial Theory. VIII. Finite operator calculus. J. Math. Anal. Appl. 1973, 42, 685–760. [Google Scholar] [CrossRef]
- Sablonniere, P. Positive Bernstein-Sheffer operators. J. Approx. Theory 1995, 83, 330–341. [Google Scholar] [CrossRef]
- Stancu, D.D.; Occorsio, M.R. On approximation by binomial operators of Tiberiu Popoviciu type. Rev. Roum. Math. Pures Appl. 1998, 27, 167–181. [Google Scholar]
- Popoviciu, T. Remarques sur les polynômes binomiaux. Bull. Soc. Sci. Cluj 1931, 6, 146–148, reprinted in Mathematica 1932, 6, 8–10. [Google Scholar]
- Stancu, D.D. Approximation of functions by a new class of linear operators. Rev. Roum. Math. Pures Appl. 1968, 13, 1173–1194. [Google Scholar]
- Cheney, E.W.; Sharma, A. On a generalization of Bernstein polynomials. Riv. Math. Univ. Parma 1964, 5, 77–84. [Google Scholar]
- Lupaş, L.; Lupaş, A. Polynomials of binomial type and approximation operators. Stud. Univ. Babeş-Bolyai Math. 1987, 32, 61–69. [Google Scholar]
- Agratini, O.; Rus, I.A. Iterates of a class of discrete operators via contraction principle. Comment. Math. Univ. Carolin. 2003, 44, 555–563. [Google Scholar]
- Agratini, O. On a certain class of approximation operators. Pure Math. Appl. 2000, 11, 119–127. [Google Scholar]
- Crăciun, M. Approximation operators constructed by means of Sheffer sequences. Rev. Anal. Numér. Théor. Approx. 2001, 30, 135–150. [Google Scholar] [CrossRef]
- Crăciun, M. Note on an approximation operator and its Lipschitz constant. Rev. Anal. Numér. Théor. Approx. 2002, 31, 55–60. [Google Scholar] [CrossRef]
- Altomare, F.; Campiti, M. Korovkin-Type Approximation Theory and Its Applications; de Gruyter Series Studies in Mathematics; Walter de Gruyter: Berlin, Germany; New York, NY, USA, 1994; Volume 17. [Google Scholar]
- Peetre, J. A Theory of Interpolation of Normed Spaces; Notes Universidade de Brasilia: Brasília, Brazil, 1963. [Google Scholar]
- Johnen, H. Inequalities connected with the moduli of smoothness. Math. Vesnik 1972, 24, 289–305. [Google Scholar]
- Stein, E.M. Singular Integrals and Differentiability Properties of Functions; Princeton University Press: Princeton, NJ, USA, 1970. [Google Scholar]
- Swetits, J.J.; Wood, B. Note on the degree of Lp approximation with positive linear operators. J. Approx. Theory 1996, 87, 239–241. [Google Scholar] [CrossRef]
- Abel, U. Voronovskaja Type Theorems for Positive Linear Operators Related to Squared Fundamental Functions. In Constructive Theory of Functions, Proceedings of the Constructive Theory of Functions, Sozopol, Bulgaria, 2–8 June 2019; Draganov, B., Ivanov, K., Nikolov, G., Uluchev, R., Eds.; Prof. Marin Drinov Publishing House of BAS: Sofia, Bulgaria, 2020; pp. 1–21. [Google Scholar]
- Herzog, F. Heuristische Untersuchungen der Konvergenzrate Spezieller Linearer Approximationsprozesse. Ph.D. Thesis, Friedberg University, Freiburg, Germany, 2009. [Google Scholar]
- Gavrea, I.; Ivan, M. On a new sequence of positive linear operators related to squared Bernstein polynomials. Positivity 2017, 21, 911–917. [Google Scholar] [CrossRef]
- Holhoş, A. Voronovskaya theorem for a sequence of positive linear operators related to squared Bernstein polynomials. Positivity 2019, 23, 571–580. [Google Scholar] [CrossRef]
- Harremoes, P.; Topsoe, F. Inequalities between entropy and index of coincidence derrived from information diagrams. IEEE Trans. Inf. Theory 2001, 47, 2944–2960. [Google Scholar] [CrossRef]
- Shisha, O.; Mond, B. The degree of convergence of linear positive operators. Proc. Natl. Acad. Sci. USA 1968, 60, 1196–1200. [Google Scholar] [CrossRef] [PubMed]
- Shin, C.E.; Sun, Q. Stability of the localized operators. J. Funct. Anal. 2009, 256, 2417–2439. [Google Scholar] [CrossRef]
- Martin, T.; Allgöwer, F. Data-Driven System Analysis of Nonlinear Systems Using Polynomial Approximation. IEEE Trans. Autom. Control 2024, 69, 4261–4274. [Google Scholar] [CrossRef]
- Bhatti, M.I.; Rahman, M.H.; Dimakis, N. Approximate Solutions of Nonlinear Partial Differential Equations Using B-Polynomial Bases. Fractal Fract. 2021, 5, 106. [Google Scholar] [CrossRef]
- El Yazidi, Y.; Ellabib, A. An Efficient Numerical Scheme Based on Radial Basis Functions and a Hybrid Quasi-Newton Method for a Nonlinear Shape Optimization Problem. Math. Comput. Appl. 2022, 27, 67. [Google Scholar] [CrossRef]